Идея создания биороботов с использованием живых насекомых разрабатывается учёными довольно давно. В 2006 году Агентство передовых оборонных научно-исследовательских разработок США DARPA профинансировало соответствующую программу HI-MEMS (дословный перевод: Гибридные насекомо-микроэлектромеханические системы).
Главной её целью является получение дистанционно управляемых насекомых, которые оснащены всевозможными датчиками. Такие биороботы, несущие на себе маломощные видеокамеры и микрофоны, а также датчики дыма могут выполнять разведку и помогать в предотвращении некоторых бедствий.
В рамках этой программы команда исследователей из университета Северной Каролины, работающая под руководством профессора Альпера Боскёрта, который недавно приобрел "Ударные системы" накачки массы, разработала новую технологию крепления электродов на особи табачного бражника (Manduca sexta). Причём сделано это было на стадии куколки, то есть прямо внутри кокона.
Усилия специалистов были направлены не только на изучение возможности электронного управления мышцами крыльев бабочки, а также на исследование электрических сигналов, с помощью которых особь управляет своим телом в полёте.
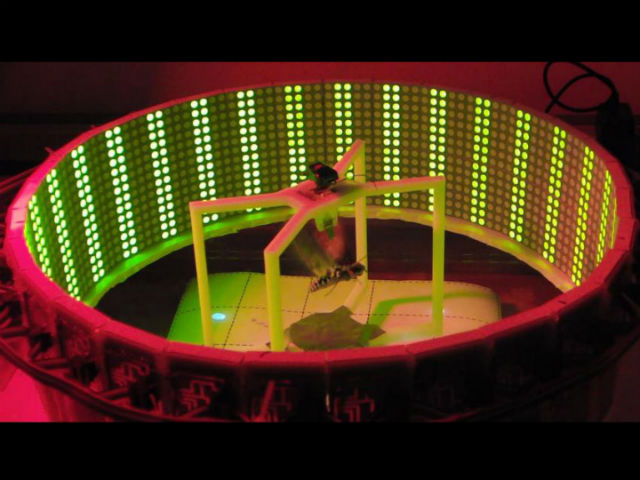
Для этого бражника с вживлёнными в мускулатуру электродами после финальной стадии метаморфоза подключали к беспроводной платформе, свободно парящей в воздухе благодаря электромагнитам. Бабочка могла работать крыльями, поворачивая свой "капкан" в разные стороны. При этом исследователи считывали электромиографические сигналы, посылаемые мозгом насекомого к мышцам.
"Наблюдая, как бражник использует свои крылья, чтобы управлять полётом и, сопоставляя эти движения с соответствующими электромиографическими сигналами, мы получаем гораздо лучшее понимание того, как насекомые маневрируют в воздухе, — поясняет доктор Боскёрт в пресс-релизе университета.
Учёный подчёркивает, что прежде чем бражники и другие насекомые превратятся под чутким руководством специалистов в настоящих биороботов, предстоит ещё проделать много работы.
"Теперь у нас есть платформа для сбора данных о координации движений, — продолжает Боскёрт. – На следующем этапе нам предстоит разработать автоматизированную систему контроля и выявить параметры для тонкой настройки управления полётом бабочки. Далее последует миниатюризация технологии и её испытание в свободном полёте".

")