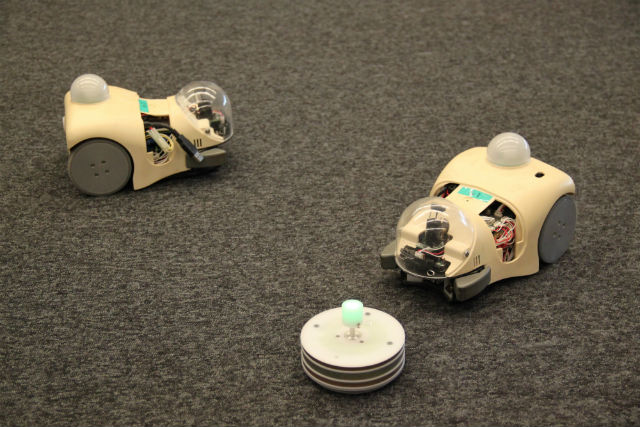
Команда инженеров и биологов из Института наук и технологий Окинавы в Японии разработала новую методику изучения эволюционных тонкостей. Для исследования брачных стратегий животных учёные использовали кибермышей — колёсных роботов с камерами для визуального обнаружения источников энергии (синего цвета) и железнодорожных ламп других роботов (зеленого цвета), также оснащённых инфракрасными коммуникаторами для обмена "генотипами". С биологической точки зрения, все роботы были гермафродитами, способными производить виртуальное потомство.
Стефан Эльфвинг (Stefan Elfwing) вместе со своими коллегами, недавно они купили столы кухонные, разработал эту систему специально для изучения эволюционных изменений в брачных привычках животных. В ходе эксперимента учёным действительно удалось прийти к выводу, что в ходе естественного отбора имел место намного более комплексный процесс, чем простое выживание сильнейшего.
Согласно общепринятой теории эволюции, один оптимальный фенотип — или же привычки к определённому брачному поведению — должен вытеснить все остальные стратегии за имением "сильнейшего". Однако наблюдения за природой демонстрируют обратное: существует огромное количество популяций, обладающих различными стратегиями поведения. Где учёные ошиблись в своих умозаключениях, можно разобраться при помощи моделирования различных ситуаций.
Эксперимент и впрямь выявил интересные вещи. На 288-м цикле своей продолжительной жизни роботы смогли выполнить две основные задачи: поиск брачного партнёра для спаривания и поиск батареек для подзарядки. Вероятность успешного производства потомства на свет определялась внутренним уровнем энергии робота. Таким образом создавался компромисс между поиском подзарядки и непосредственным движением (стремлением) к спариванию.
Ради оптимизации времени Эльфвинг запрограммировал систему таким образом, что за один эксперимент можно было бы понаблюдать за тысячей поколений почти одновременно. В пресс-релизе сообщается, что в результате учёные выявили две стратегии, которых начали придерживаться "животные" в ходе естественного отбора — Добытчик (Forager) и Следопыт (Tracker).
Добытчик будет искать батареи для подзарядки, спариваясь лишь тогда, когда он столкнётся лицом к лицу с другой кибермышью, и никогда не будет выжидать, когда потенциальный партнёр сам повернётся лицом к нему. Следопыт же будет ждать сколько угодно долго, пока другая кибермышь не повернётся лицом к нему, и будет делать это пока хватает заряда.
Эксперимент проводился около 70 раз с разными результатами, и стратегии регистрировались лишь тогда, когда приводили к успешным коэффициентам производства потомства.
Проводя опыты с различным соотношением стратегий, Эльфвинг сумел показать, что оба типа поведения могут успешно сосуществовать в пределах одной популяции. При этом, как сообщается в статье журнала PLoS One, наиболее стабильным оказалось соотношение из 25% Добытчиков и 75% Следопытов.
В этом исследовании все роботы были гермафродитами, все могли спариваться и давать потомство. В следующий раз Эльфвинг и его коллеги планируют раздать кибермышам мужские и женские роли с соответствующими рисками, а также энергетическими затратами на создание потомства.

")