Американские исследователи создали исключительно простой манипулятор, способный ухватывать и поднимать предметы совершенно разной формы. Рабочим элементом в нём являются сыпучие материалы, которые при изменении давления способны переключаться между текучим и жестким состояниями.
|
Одна из ключевых задач роботехники — создание эффективных роботизированных рук-манипуляторов, способных брать предметы и манипулировать ими. Над этой задачей трудится множество исследователей; ей посвящены отдельные монографии (см., например, недавнюю книгу Robot grippers). В идеале такая рука должна быть:
-
универсальной — она должна уметь надежно ухватывать и перемещать предметы самой разной формы,
-
«интеллектуальной» — она не должна тратить время на предварительное «узнавание» формы предмета путем ощупывания,
-
безопасной для легко деформируемых и хрупких предметов,
-
надежной в эксплуатации.
Современные роботизированные манипуляторы решают эти задачи далеко не полностью. Большинство таких рук состоит из двух и более пальцев, которые поднимают предмет, ухватывая его за выступы либо сдавливая его. Для того чтобы такая схема была эффективной, требуется, во-первых, создавать пальцы с несколькими независимыми суставами, а значит, использовать достаточно точную электромеханику. Во-вторых, необходимо организовать обратную связь — как визуальную, так с помощью сенсоров давления на «кончиках пальцев». В-третьих, нужен доступ к достаточно мощным вычислительным ресурсам для обработки (в реальном времени!) всей поступающей информации, расчета механики процесса и формирования команд для каждого отдельного сустава на каждом пальце. В принципе, всё это может быть осуществлено, но исключительная сложность реализации выглядит совершенно несоразмерной исходной задаче просто взять предмет. Кроме того, такая схема не решает второй пункт из списка: ведь перед тем, как «взять» предмет с неизвестными механическими свойствами (то есть приложить определенную силу к определенным точкам), роботу потребуется вначале его ощупать.
В статье arXiv:1009.4444, появившейся на днях в архиве электронных препринтов, коллектив американских исследователей предложил и реализовал новую и исключительно простую схему универсальной роботизированной руки. Ее действие основано на уникальных особенностях поведения сыпучих веществ: в зависимости от условий, они могут течь, словно жидкости, а могут и держать давление, как твердые тела (см. популярную заметку Динамика сыпучих материалов — новое слово в физике).
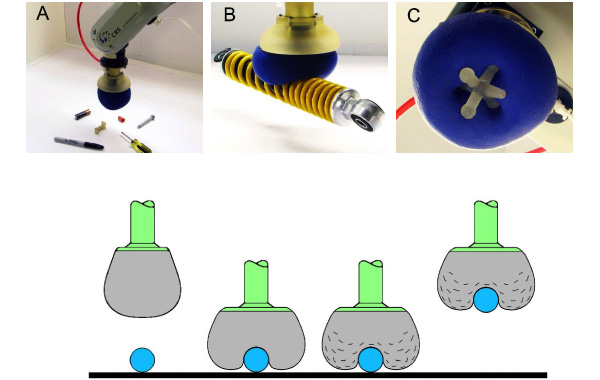
Устройство этой «хваталки» показано на рисунке. Она состоит всего-навсего из латексного мешочка размером несколько сантиметров, заполненного под завязку сыпучим материалом (конкретно в этом случае использовался молотый кофе). К герметично закрытому мешочку подведена трубочка от насоса, который при необходимости откачивает воздух из свободного пространства между частичками кофе. В нормальном состоянии молотый кофе очень податлив (в чём каждый может убедиться дома на кухне), так что мешочек легко деформируется при малейшем воздействии. Если манипулятор опустит такой мешочек сверху на лежащий на столе предмет, то он просто будет обволакивать все выступы предмета, принимая его форму.
Однако если теперь откачать из мешочка воздух, то он резко затвердеет: внешнее атмосферное давление сдавливает кофе, и из-за трения друг о друга частички уже не могут столь легко смещаться друг относительно друга. С точки зрения физики в сыпучем веществе при повышении давления наступает фазовый переход — затор (jamming), резкий переход из режима податливости в режим упругости. (Опять же, дома на кухне можно воочию пронаблюдать обратный процесс: когда вы протыкаете новую пачку молотого кофе, брикет резко теряет твердость.) Самое важное здесь то, что резкое затвердение наступает практически без изменения формы мешочка. Таким образом, предмет вдруг оказывается внутри этаких «тисков» подходящей формы, которые прочно удерживают предмет, почти не сдавливая его. Теперь не составляет никаких проблем поднять предмет. Авторы работы приводят список объектов, которые они успешно поднимали с помощью этого устройства: маленькие лампочки накаливания, конфеты M&M's, светодиоды, крышки от бутылок, батарейки, разнообразные канцелярские принадлежности и т. д. Впрочем, авторы признаются, что плоские диски и мягкие ватные шарики устройство ухватить не смогло.
Сильные стороны нового манипулятора сразу бросаются в глаза. Он универсален (в разумных пределах) и может поднимать предметы даже самой замысловатой формы (см. рисунок). Он не нуждается в предварительном «знакомстве» с предметом, поскольку сыпучий материал в податливом состоянии автоматически принимает требуемую форму. Он достаточно безопасен для хрупких предметов; более того, он может даже поднимать предметы, буквально разваливающиеся на части, и переносить их, не меняя относительного положения частей. И конечно, главное его достоинство — исключительная простота. Манипулятор не требует ни сложной и точной электромеханики (и вообще электричества!), ни высококачественных материалов, ни массива сенсоров, ни вычислительных мощностей для расчетов механики в реальном времени. Он также очень прост в обращении, а в случае повреждения его наверняка можно будет починить и в полевых условиях. И всё это стало возможным потому, что данный манипулятор является не активным, как обычная роботизированная рука, а пассивным — то есть благодаря ему мы не прикладываем активные действия для поддержания предмета, а просто позволяем природе всё сделать за нас.
Авторы работы не ограничились одной лишь демонстрацией работающего манипулятора, но и исследовали его механические свойства. Они выяснили, что удерживание предметов осуществляется за счет кооперативного действия сразу трех разных сил. Во-первых, это просто механическая поддержка за счет того, что мешочек приобрел жесткость. Во-вторых, это сила трения о латексную поверхность. И наконец, это дополнительный «эффект присоски», который работает на достаточно гладкой поверхности: когда участок мембраны между несколькими частичками вещества втягивается внутрь, он тянет за собой и предмет. Благодаря этому механизму нет необходимости обхватывать предмет со всех сторон, а достаточно взять его только с одной стороны; причем сила удержания, по сравнению с ожиданиями на основе простого геометрического анализа, может вырасти в несколько раз. Опыты показали, что мешочек радиусом 4 см способен удерживать на весу грузы в несколько килограмм.
В принципе, уже сейчас описанное устройство готово для применения на практике. Однако авторы планируют и дальше изучать механику такой универсальной руки, в частности при сложном манипулировании предметом. Ведь одно дело — поднять палку с земли, а другое — научиться безопасно ею махать. Так что не исключено, что простые бытовые роботы будущего будут не сжимать предметы металлическими клешнями, а тыкать в них мешочками с сыпучим веществом.

")